

 联系我们
联系我们

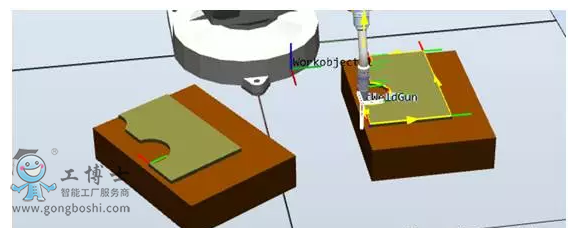
2)完成右边轨迹示教Path_30,如上图。起点为Target_20。
3) 完成左边起点的示教,为Target_ref_start,如下图。
注:如果左边产品轨迹有旋转,示教的Target_ref_start相对于左边产品的姿态要和Target_20相对于右边产品的姿态一致(此处左边产品旋转了30°,示教的角度z方向也旋转了30°)
4) 插入指令如下


MoveJ pHome,v1000,z100,tWeldGun\WObj:=wobj0;//移动到Home位置
Path_30;//运行右边产品轨迹
MoveJpHome,v1000,z100,tWeldGun\WObj:=wobj0;//回到Home
MoveJTarget_ref_start,v1000,fine,tWeldGun\WObj:=wobj0;//走到左边产品起点
ConfJ\Off;//因为使用偏移,关闭轴配置监控,否则有可能使用原配置参数导致位置走不到而报错 ConfL\Off; //因为使用偏移,关闭轴配置监控,否则有可能使用原配置参数导致位置走不到而报错
PDispOn\Rot,Target_20,tWeldGun;//设定当前位置和Target_20的偏差关系(包括平移和旋转),因为此时机器人停在Target_ref_start起点,即设定左边轨迹和右边轨迹的整体偏移关系。使用\rot表示平移和旋转均计算。如果不使用\rot,则只使用平移,旋转不计算
Path_30;//运行原有轨迹,此时轨迹参考坐标移动关系,ABB机器人实际走左边产品轨迹
PDispOff;//轨迹完成,关闭平移关系
MoveJ pHome,v1000,z100,tWeldGun\WObj:=wobj0;
